A Distributed Industrial Automation and Control Framework for Linux, Mac and Windows. #Industrial automation #Industrial control #4DIAC IDE #Distributed #Industrial #Automation
4DIAC (Framework for Distributed Industrial Automation and Control) is an open source and freely distributed framework specially designed for distributed industrial control and automation. It provides a free IEC 61499-compliant basis that permits creation of distributed industrial automation and control environments.
The 4DIAC project is comprised of four tools, 4DIAC-IDE (the IEC 61499 compliant engineering tool), FORTE (the IEC 61499 run-time environment), 4DIAC-LIB (the IEC 61499 function block library) and 4DIAC-Systems (the IEC 61499 example projects).
It’s a portable, highly configurable and interoperable software that has been engineered as a drop-in replacement for numerous similar commercial tools that exist in the domain of automation industry.
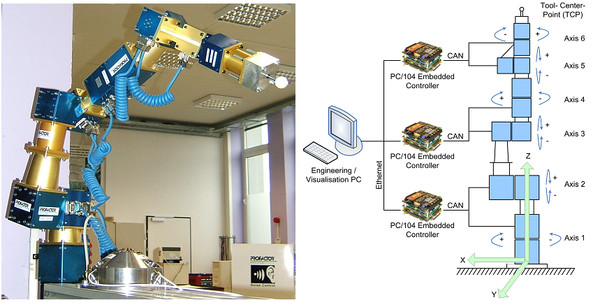
4DIAC can be used to control a reconfigurable robotic system, also known as a modular 6-DOF robot, which uses mechatronic components and comprises of six separate joints that are actually PowerCube modules. Some special connectors are used to connect this six modules with each.
The 4DIAC-IDE is in charge of controlling the engineering of the robot’s IEC 61499 control program. Please note that the implementation of the Robot HMI Application (RHA) and Robot Control Application (RCA) was born from the hardware structure of the modular 6-DOF robot. More details can be found on the project’s homepage.
4DIAC is a cross-platform software written in the Java and C++ programming languages. It is designed from the ground up to support the GNU/Linux, FreeBSD, Mac OS X and Microsoft Windows operating systems. The application has been successfully tested on both 64-bit and 32-bit instruction set architectures.
The program is available for download from Softpedia or directly from its official website, as both a universal source archive and a pre-built binary package. FORTE is also distributed on Softpedia and it’s available for download only as a universal source package.
4DIAC 1.7.3 / 1.8 Milestone 1
add to watchlist add to download basket send us an update REPORT- runs on:
- Linux
- main category:
- Text Editing&Processing
- developer:
- visit homepage
Zoom Client 6.0.3.37634

Bitdefender Antivirus Free 27.0.35.146

Windows Sandbox Launcher 1.0.0

Context Menu Manager 3.3.3.1

Microsoft Teams 24060.3102.2733.5911 Home / 1.7.00.7956 Work

7-Zip 23.01 / 24.04 Beta

IrfanView 4.67

4k Video Downloader 1.5.3.0080 Plus / 4.30.0.5655

ShareX 16.0.1

calibre 7.9.0

- 4k Video Downloader
- ShareX
- calibre
- Zoom Client
- Bitdefender Antivirus Free
- Windows Sandbox Launcher
- Context Menu Manager
- Microsoft Teams
- 7-Zip
- IrfanView