Dstar Lite is a C implementation of the D* Lite algorithm as explained in [Koenig, 2002].. #C implementation #D* Lite algorithm #Computation library #C #Library #Algorithm
Dstar Lite is a C implementation of the D* Lite algorithm as explained in [Koenig, 2002].
There are a few minor modifications to this code to improve computation time and path distance. This is a very simple piece of software and should take very little time to understand and integrate.
[q/Q] - Quit [r/R] - Replan [a/A] - Toggle Auto Replan [c/C] - Clear (restart) left mouse click - make cell untraversable (cost -1) middle mouse click - move goal to cell right mouse click - move start to cell
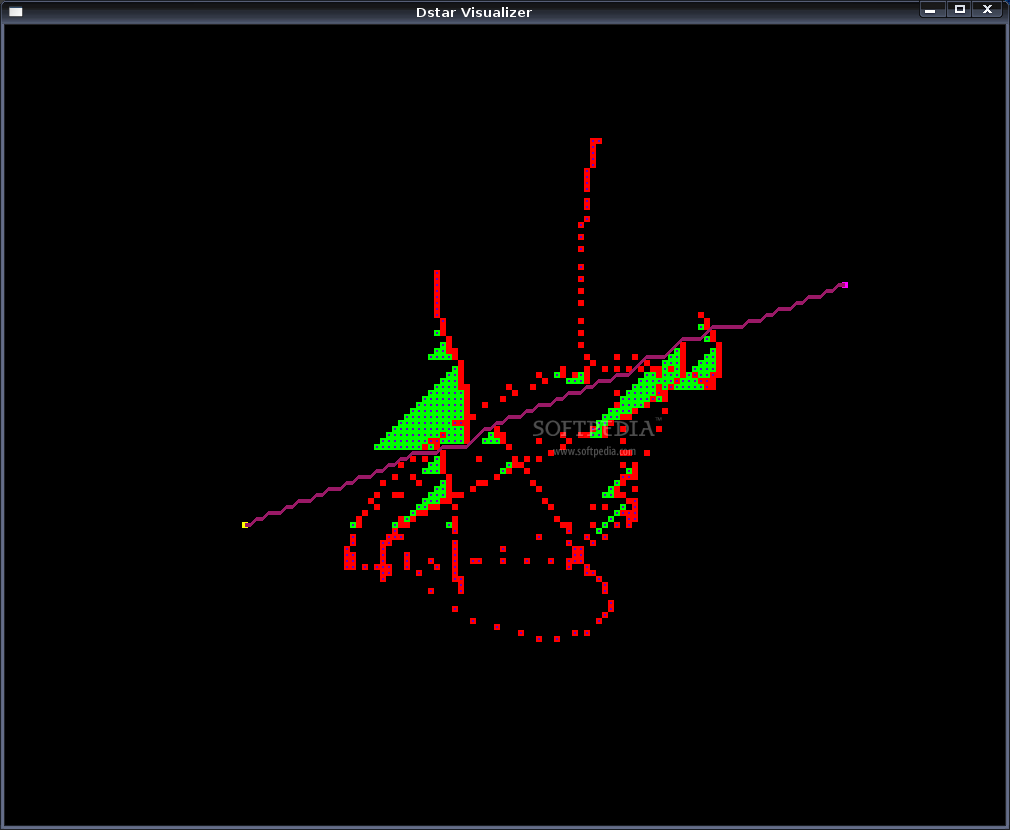
The cell colors are as follows:
Red - untraversable Green - traversable but with changed cost Red/Green with small purple square - The cell is on the openList Yellow - start cell Purple - goal cell
Here is a simple working test program that uses the Dstar class:
#include "Dstar.h"
int main() { Dstar *dstar = new Dstar(); list mypath;
dstar->init(0,0,10,5); // set start to (0,0) and goal to (10,5) dstar->updateCell(3,4,-1); // set cell (3,4) to be non traversable dstar->updateCell(2,2,42.432); // set set (2,2) to have cost 42.432
dstar->replan(); // plan a path mypath = dstar->getPath(); // retrieve path
dstar->updateStart(10,2); // move start to (10,2) dstar->replan(); // plan a path mypath = dstar->getPath(); // retrieve path
dstar->updateGoal(0,1); // move goal to (0,1) dstar->replan(); // plan a path mypath = dstar->getPath(); // retrieve path
return 0; }
Dstar Lite 1.0
add to watchlist add to download basket send us an update REPORT- runs on:
- Linux
- main category:
- Science and Engineering
- developer:
- visit homepage
Context Menu Manager 3.3.3.1

IrfanView 4.67

Zoom Client 6.0.3.37634

Bitdefender Antivirus Free 27.0.35.146

7-Zip 23.01 / 24.04 Beta

Microsoft Teams 24060.3102.2733.5911 Home / 1.7.00.7956 Work

4k Video Downloader 1.5.3.0080 Plus / 4.30.0.5655

Windows Sandbox Launcher 1.0.0

calibre 7.9.0

ShareX 16.0.1

- Windows Sandbox Launcher
- calibre
- ShareX
- Context Menu Manager
- IrfanView
- Zoom Client
- Bitdefender Antivirus Free
- 7-Zip
- Microsoft Teams
- 4k Video Downloader